視覺(jué)龍VDSR智能相機(jī)定位案例
- 時(shí)間:2017-06-09作者:深圳市視覺(jué)龍科技有限公司瀏覽:163
深圳市視覺(jué)龍科技有限公司專注于視覺(jué)系統(tǒng),三維傳感器,智能相機(jī)等
詞條
詞條說(shuō)明
視覺(jué)龍VDSR視覺(jué)傳感器—充電器穿線檢測(cè)項(xiàng)目案例
硬件配置: VDSR-130萬(wàn)+變倍遠(yuǎn)心鏡頭 檢測(cè)要求:檢測(cè)針腳是否穿過(guò)鐵件并彎折,不良品**檢出。 項(xiàng)目功能:通過(guò)視覺(jué)檢測(cè)出不良品,機(jī)構(gòu)將不良品從治具取出,管控前段自動(dòng)穿線機(jī)的不良品流向后段。 https:///tencentvideo_v1/playerv3/TPout.swf?max_age=86400&v=20161117&vid=g0522minh08
視覺(jué)龍VD200機(jī)器人引導(dǎo)控制系統(tǒng)案例-太陽(yáng)能硅片
VD200--太陽(yáng)能硅片案例, 采用Adept機(jī)械手取片,在焊接生產(chǎn)線上放片, 運(yùn)行的過(guò)程中完成糾偏。 糾偏流程節(jié)拍2.5s,精度±0.05mm. http:///player.php/sid/XMTM3NDMwOTQyOA==/v.swf
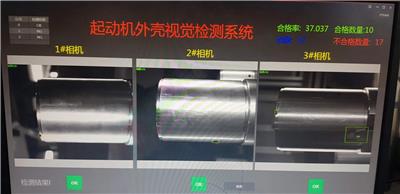
定位要求: 流程:運(yùn)動(dòng)平臺(tái)抓取產(chǎn)品到達(dá)相機(jī)拍照點(diǎn),VDSR通過(guò)以太網(wǎng)把產(chǎn)品的坐標(biāo)值發(fā)送給外部設(shè)備,外部設(shè)備根據(jù)坐標(biāo)值調(diào)整運(yùn)動(dòng)平臺(tái),把產(chǎn)品準(zhǔn)確放到治具中。 精度:0.03mm 定位參數(shù): 相機(jī):130萬(wàn) 相機(jī)分辨率:1280*1024 視野:20mm*16mm 精度:20mm/1280pixel=0.0156mm/pixel<0.03mm 滿足精度要求 相機(jī)標(biāo)定: 通過(guò)兩點(diǎn)標(biāo)定,把圖像畸變以
【視覺(jué)龍】純嵌入式視覺(jué)控制系統(tǒng)在全自動(dòng)點(diǎn)焊機(jī)上的應(yīng)用
項(xiàng)目視頻連接:http:///Show_Solutions.asp?id=216 本項(xiàng)目采用視覺(jué)龍*的純嵌入式視覺(jué)控制系統(tǒng)(VDSR視覺(jué)傳感器+VPAD視覺(jué)平板)來(lái)實(shí)現(xiàn)高精度全自動(dòng)點(diǎn)焊。相比PC式系統(tǒng),嵌入式系統(tǒng)的穩(wěn)定性較高、體積小、成本低,且易學(xué)、易使用、易維護(hù)、易安裝等。 項(xiàng)目中的三軸機(jī)械平臺(tái)在使用純嵌入式視覺(jué)控制系統(tǒng)后可實(shí)現(xiàn)對(duì)IC卡焊盤上漆包線的
聯(lián)系方式 聯(lián)系我時(shí),請(qǐng)告知來(lái)自八方資源網(wǎng)!
公司名: 深圳市視覺(jué)龍科技有限公司
聯(lián)系人: 尹女士
電 話: 075582721850
手 機(jī): 18033445254
微 信: 18033445254
地 址: 江蘇常州新北區(qū)中國(guó).深圳市龍華區(qū)民清路光輝科技園2棟2單元6樓
郵 編: 518300
網(wǎng) 址: robovimo.cn.b2b168.com
相關(guān)推薦

龍睿智能相機(jī)在3C行業(yè)的應(yīng)用—視覺(jué)引導(dǎo)ABB機(jī)器人貼標(biāo)簽
龍睿機(jī)器視覺(jué)2.0平臺(tái)—醫(yī)用寶石視覺(jué)對(duì)位貼合應(yīng)用
【視覺(jué)龍】龍睿機(jī)器視覺(jué)2.0平臺(tái)—光譜共焦傳感器應(yīng)用案例

視覺(jué)龍-軟包電池外觀AI檢測(cè)系統(tǒng)

龍?jiān)炊ragonSource低代碼視覺(jué)應(yīng)用開發(fā)平臺(tái)
【視覺(jué)龍】鋰電行業(yè)機(jī)器視覺(jué)案例分享
【視覺(jué)龍】3C行業(yè)機(jī)器視覺(jué)案例

【視覺(jué)龍】新品發(fā)布:VD-S系列智能相機(jī)
相關(guān)閱讀
1、本信息由八方資源網(wǎng)用戶發(fā)布,八方資源網(wǎng)不介入任何交易過(guò)程,請(qǐng)自行甄別其真實(shí)性及合法性;
2、跟進(jìn)信息之前,請(qǐng)仔細(xì)核驗(yàn)對(duì)方資質(zhì),所有預(yù)付定金或付款至個(gè)人賬戶的行為,均存在詐騙風(fēng)險(xiǎn),請(qǐng)?zhí)岣呔瑁?
- 聯(lián)系方式
公司名: 深圳市視覺(jué)龍科技有限公司
聯(lián)系人: 尹女士
手 機(jī): 18033445254
電 話: 075582721850
地 址: 江蘇常州新北區(qū)中國(guó).深圳市龍華區(qū)民清路光輝科技園2棟2單元6樓
郵 編: 518300
網(wǎng) 址: robovimo.cn.b2b168.com
- 相關(guān)企業(yè)
- 慶云銳科電氣有限公司
- 億宸自動(dòng)化控制系統(tǒng)(武漢)有限公司
- 北京龍威盛達(dá)科技有限公司
- 廣州雙健電子科技有限公司
- 上海暖亞智能電氣設(shè)備有限公司
- 深圳易通技術(shù)股份有限公司
- 山東科銳電力科技有限公司
- 深圳市拓瞳科技有限公司
- 無(wú)錫天誠(chéng)智能充電設(shè)備有限公司
- 商家產(chǎn)品系列
- 產(chǎn)品推薦
- 資訊推薦




¥250000.00


¥1.00