機車無人駕駛系統
- 時間:2025-03-25作者:深圳龍鐵高科技術有限公司瀏覽:685
深圳龍鐵高科技術有限公司專注于機車AI視覺系統,機車自動充電系統,機車智能駕駛系統,機車智能駕駛輔助系統,車鉤碰撞距離檢測系統,智能駕駛感知系統,司機分心駕駛檢測系統,機車500萬高清視頻系統等, 歡迎致電 13826575588
詞條
詞條說明
隨著客戶的需求不斷變化,原公司網站的風格及內容已遠遠不能滿足客戶及市場的需要,為向廣大新老客戶進一步展示公司的規模與實力、了解公司的產品和服務內容。公司對網站重新改版,加大網絡宣傳力度。通過與專業網站設計公司與內部相關人員的精心策劃與籌備,我公司新版網站于2017年1月16日正式進入上線公開測試階段! 目前網站進入上線公開測試階段,如果您在瀏覽中發現任何異常,請您諒解并可與我司取得聯系,我們將在短
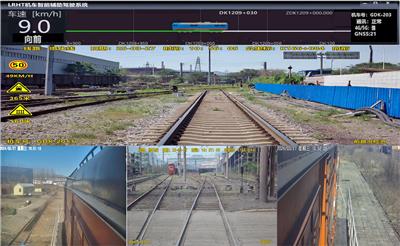
富士隆重載列車牽引視頻裝置,已經成功運用在某鐵路系統,經過ABC三節電力機車重聯,每臺車可獨立操作控制,當駕駛人員在A端時,同時可以觀看B與C端的圖像與防火,數據通訊,并與防火裝置,TAX2數據通訊進行交互,使得相關人員更能通過高清視頻直觀的反應現場情況,并可通過4G無線傳輸系統,把現場的情況傳回相關的調度中心。
LR-TRADS-V300導航視覺增強技術在無人駕駛中的應用
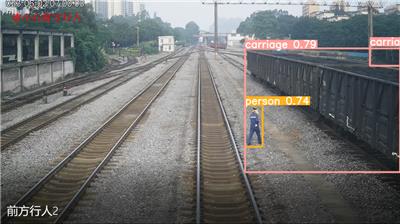
車載導航視覺增強系統的核心理念是,將車況路況場景的實時采集任務分為靜態場景記錄和動態場景識別兩部分,并利用車載導航設備和AI攝像頭分別解決。靜態場景是指所有固定的、不隨時間變化的軌道基礎設施幾何信息,如軌道線路的位置、線形、坡度,地面交通標示、信號燈位置、道口、道岔位置等。而場景動態信息則是指與時間相關的場景信息,如機車的位置和動態、信號燈的顏色、前方出現的行人、車輛和障礙物等。靜態場景記錄是利用
當道口機器人檢測到前方或后方100-2000米內的列車是,此100-2000米的距離,是可以根據用戶的要求做定位,前提是列車上面必須有安裝位置定位接收模塊,用基于兩點的無線空間位置算法,計算出該機車接近道口的距離與來車方向,如果在提醒的距離內,車上的設備會主動給道口機器人命令,打開語音提醒,列車來了,請行人注意,同時視覺識別道口行車與機動車的狀況,并實時傳輸到列車駕駛室;機器人檢測到列車通過道口
聯系方式 聯系我時,請告知來自八方資源網!
公司名: 深圳龍鐵高科技術有限公司
聯系人: 邵旺龍
電 話: 0755-82596822
手 機: 13826575588
微 信: 13826575588
地 址: 廣東深圳龍崗南灣街道布沙路深馬工業園A棟502A-502B-502C
郵 編:
網 址: fujilong.b2b168.com
相關推薦




相關閱讀
1、本信息由八方資源網用戶發布,八方資源網不介入任何交易過程,請自行甄別其真實性及合法性;
2、跟進信息之前,請仔細核驗對方資質,所有預付定金或付款至個人賬戶的行為,均存在詐騙風險,請提高警惕!
- 聯系方式
公司名: 深圳龍鐵高科技術有限公司
聯系人: 邵旺龍
手 機: 13826575588
電 話: 0755-82596822
地 址: 廣東深圳龍崗南灣街道布沙路深馬工業園A棟502A-502B-502C
郵 編:
網 址: fujilong.b2b168.com
- 相關企業
- 深圳市凡可為科技有限公司
- 上海分朗智能科技有限公司
- 深圳市鵬鑫威科技有限公司
- 深圳頭程國際貨運代理有限公司
- 深圳市達普通訊有限公司
- 深圳市科華爾科技有限公司
- 廣州市旺東電子科技有限公司
- 深圳市保駕科技有限公司
- 廣州市騰廣電子科技有限公司
- 商家產品系列
- ic卡
- 安防
- 安全檢查設備
- 安全器材
- 顯示器
- 防爆攝像機
- 防盜報警配件
- 防盜報警主機
- 防偽技術產品
- 感應卡
- 感應式讀卡器
- 高清攝像機
- 指紋識別設備
- 智能卡
- 樓宇對講機
- 門磁
- 門禁卡
- 門禁考勤設備
- 門禁識別設備
- 面部識別門禁控制設備
- 煙感探測器
- 遙控器
- 一卡通系統
- 叫號機
- 接觸式讀卡器
- 鏡頭
- 可視對講產品
- 可視對講外殼
- 公共廣播系統
- 光端機
- 產品推薦
- 資訊推薦



¥370.00





¥1098.00



¥1200.00
