龍鐵為中車大連廠定制新能源機車AI視覺系統
- 時間:2024-11-19作者:深圳龍鐵高科技術有限公司瀏覽:568
深圳龍鐵高科技術有限公司專注于機車AI視覺系統,機車自動充電系統,機車智能駕駛系統,機車智能駕駛輔助系統,車鉤碰撞距離檢測系統,智能駕駛感知系統,司機分心駕駛檢測系統,機車500萬高清視頻系統等, 歡迎致電 13826575588
詞條
詞條說明
黑夜是鐵路行車事故高頻發生的時間段,昏暗不明的環境催化了各種路況事故的發生。機車普通攝像系統在黑夜環境下無法清晰成像,紅外補光技術雖然能在低照度下清晰成像,但只能形成黑白圖像,丟失重要的色彩信息。龍鐵高科星光級攝像系統解決司機晚上行車問題,為帶來更佳體驗 ?龍鐵高科星光攝像系統,采用高感光sensor,搭配大光圈的鏡頭,并配備優異的ISP圖像處理技術,在夜晚無任何輔助光源的情況下,
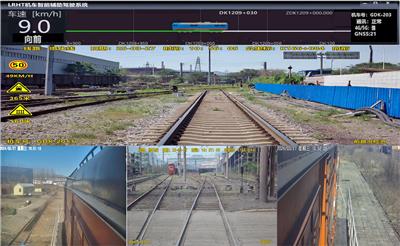
1 .機車精確定位目前機車定位主要靠輪速傳感器和GPS/北斗定位。使用輪速傳感器累計里程存在誤差累積問題,GPS定位精度易受信號干擾和遮擋,在山區誤差較大,在隧道內無法工作。位置更新率只有1Hz ,不能滿足實際需求。衛慣組合是將衛星定位技術與慣性導航技術相互組合,實現優勢互補,既保證在正常情況下定位精度小于1米,定位頻率達到100Hz,也能保證在山區、隧道內部的定位精度不受影響,同時還能輸出準確的
LR-TRADS-V300導航視覺增強技術在無人駕駛中的應用
車載導航視覺增強系統的核心理念是,將車況路況場景的實時采集任務分為靜態場景記錄和動態場景識別兩部分,并利用車載導航設備和AI攝像頭分別解決。靜態場景是指所有固定的、不隨時間變化的軌道基礎設施幾何信息,如軌道線路的位置、線形、坡度,地面交通標示、信號燈位置、道口、道岔位置等。而場景動態信息則是指與時間相關的場景信息,如機車的位置和動態、信號燈的顏色、前方出現的行人、車輛和障礙物等。靜態場景記錄是利用
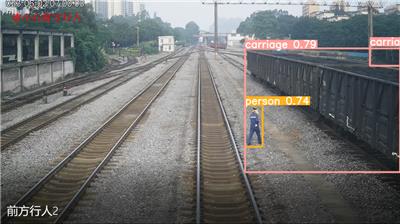
前方感知視覺是機車智能駕駛不可少的硬件設備。單目和雙目是單攝像頭和雙攝像頭在外觀上的區別。機車單目視覺系統是平面圖像的處理,感知任務是車道線檢測、交通標志識別和障礙物檢測(車輛、行人等交通參與者)。車載雙目視覺系統通過模人眼來構建物體的立體圖像。感知任務是目標檢測、分類和測距、多目標跟蹤以及對經過的空間和場景的理解。單目和雙目視覺系統的優缺點:該雙目視覺系統測距方法具有、、系統結構簡單、的優點。然
聯系方式 聯系我時,請告知來自八方資源網!
公司名: 深圳龍鐵高科技術有限公司
聯系人: 邵旺龍
電 話: 0755-82596822
手 機: 13826575588
微 信: 13826575588
地 址: 廣東深圳龍崗南灣街道布沙路深馬工業園A棟502A-502B-502C
郵 編:
網 址: fujilong.b2b168.com
相關推薦




相關閱讀
1、本信息由八方資源網用戶發布,八方資源網不介入任何交易過程,請自行甄別其真實性及合法性;
2、跟進信息之前,請仔細核驗對方資質,所有預付定金或付款至個人賬戶的行為,均存在詐騙風險,請提高警惕!
- 聯系方式
公司名: 深圳龍鐵高科技術有限公司
聯系人: 邵旺龍
手 機: 13826575588
電 話: 0755-82596822
地 址: 廣東深圳龍崗南灣街道布沙路深馬工業園A棟502A-502B-502C
郵 編:
網 址: fujilong.b2b168.com
- 相關企業
- 深圳市凡可為科技有限公司
- 上海分朗智能科技有限公司
- 深圳市鵬鑫威科技有限公司
- 深圳頭程國際貨運代理有限公司
- 深圳市達普通訊有限公司
- 深圳市科華爾科技有限公司
- 廣州市旺東電子科技有限公司
- 深圳市保駕科技有限公司
- 廣州市騰廣電子科技有限公司
- 商家產品系列
- 接觸式讀卡器
- 探測器
- 探頭
- 網絡攝像機
- 防盜報警配件
- 防盜報警主機
- 防偽技術產品
- 感應卡
- 感應式讀卡器
- 高清攝像機
- 公共廣播系統
- 槍型機
- 攝像監控設備
- 聲波驅散器
- 讀卡器
- 對講設備
- 二手安全、防護設備
- 防爆攝像機
- ic卡
- 安防
- 安全檢查設備
- 安全器材
- 報警器
- 閉門器
- 叫號機
- 排隊機
- 光端機
- 紅外攝像機
- 紅外微波探測器
- 視頻服務器
- 產品推薦
- 資訊推薦



¥370.00





¥1098.00



¥1200.00
